Синхронизацией колебаний называется установление и поддержание такого режима колебаний двух или нескольких систем, при котором их частоты равны или кратны друг другу. Например, если имеется связанная система, состоящая из двух автоколебательных систем с частотами ω1 и ω2, то в случае, когда ω2 близко к ω1, происходит синхронизация колебаний, т. е. системы начинают колебаться с одной и той же частотой ω. Чем больше величина связи между системами, тем при большей разности частот Δω= |ω2-ω1| происходит синхронизация; Δω называется полосой синхронизации.
Различают взаимную синхронизацию колебаний связанных систем, при которой каждая из систем действует на другую и частота синхронизации отличается от обеих исходных частот, и принудительную синхронизацию, или захватывание частоты, при которой связь между системами такова, что одна из них (синхронизирующая) влияет на другую (синхронизируемую), а обратное влияние полностью исключено; в этом случае в системе устанавливается колебание с частотой синхронизирующей системы.
Причина появления взаимной синхронизации двух связанных автоколебательных систем состоит в том, что в каждой из них под воздействием второй системы кроме собственных колебаний возникают вынужденные колебания. Вынужденные колебания в автоколебательной системе оказывают двоякое воздействие на собственные колебания этой системы. С одной стороны, происходит увлечение частоты собственных колебаний и её приближение к частоте внешней силы; с другой - вынужденные колебания подавляют амплитуду собственных колебаний и могут их полностью погасить. При взаимной синхронизации двух генераторов, сильно различающихся по мощности, более мощный генератор играет роль синхронизирующего, а менее мощный - синхронизируемого. Этот случай является переходным от взаимной синхронизации к принудительной.
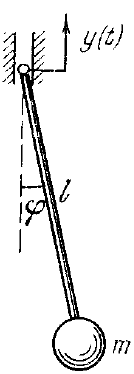
Рассмотрим маятник с вертикально колеблющейся точкой подвеса (рис.1), движение которой задано законом
у = Asinωt (1)
Маятник с колеблющейся точкой подвеса
Рис.1
Исследуем возможность непрерывного вращения маятника, поддерживаемого колебаниями оси. Вращение со средней угловой скоростью ω, равной частоте колебаний оси, и представляет явление синхронизации в рассматриваемой системе: возмущающее воздействие (колебания оси) «навязывает» свой ритм движению системы. Таким образом, предполагаемый стационарный синхронизированный режим описывается законом
φ = ωt - α, (2)
где φ — угол отклонения маятника, α — начальный сдвиг фаз.
Cоставим дифференциальное уравнения относительного движения, а затем с помощью этого уравнения выясним, возможен ли режим движения (2). В уравнение моментов относительно колеблющейся оси введем момент силы тяжести -mglsinφ и момент линейного трения -b∂φ/∂t. Кроме того, в уравнение моментов следует ввести также момент переносной силы инерции. Эта сила и является причиной синхронизации; она направлена по вертикали, и ее проекция на ось Oу равна
-m ∂2y/∂t2 = mAω2sinωt.
Момент переносной силы инерции относительно оси маятника составляет mAω2l sinφ sinωt. Таким образом, дифференциальное уравнение относительного движения
маятника запишется в виде

(3)
Для проверки возможности синхронизированного вращения маятника попробуем подставить (2) в дифференциальное уравнение (3):
mlsin(ωt - α) (Aω2sinωt - g)dt = bω. (4)
Так как здесь левая часть переменна, а правая часть постоянна, то полученное соотношение тождественно не удовлетворяется. Это означает, что функция (2) не является точным решением дифференциального уравнения (3), т. е. что равномерное вращение маятника невозможно.
Однако можно принять (2) в качестве приближенного решения задачи и, отказавшись от требования о тождественном выполнении равенства (3), ограничиться более слабым требованием о выполнении его в среднем. Именно в этом можно видеть применение той же идеи, которая лежит в основе метода медленно меняющихся амплитуд. Найдя среднее значение левой части соотношения (4)

,
приравняем его правой части того же соотношения. После этого получим
(5)
Выражение (5) позволяет найти сдвиг фаз; но еще более важно, что из этого выражения следует условие синхронизации (захватывания)

(6)
Как видно, чем больше дебаланс маятника ml и максимальная скорость Аω колебаний оси маятника, тем легче осуществляется синхронизация. Важный фактор, который может воспрепятствовать синхронизации,— это трение в системе, характеризуемое коэффициентом b; чем больше трение, тем труднее достигается синхронизация.
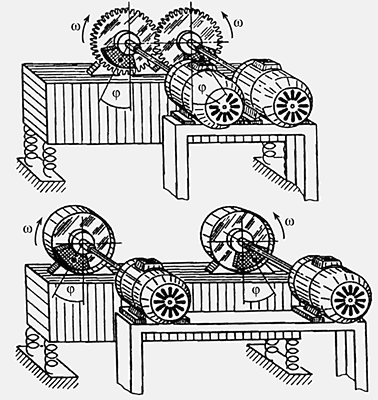
Толчком к обнаружению явления самосинхронизации неуравновешенных роторов как раз и послужило случайное наблюдение описанного эффекта в ленинградском институте “Механобр” в 1948г. При длительных испытаниях вибрационной машины с двумя механическими вибровозбудителями (неуравновешенными роторами, которые приводились во вращение от асинхронных электродвигателей) оборвался провод, подающий напряжение к одному из двигателей. Наличие обрыва, однако, выяснилось лишь спустя несколько часов, ибо установка продолжала нормально работать. В том же институте было выполнено и большинство теоретических исследований и экспериментально-конструкторских разработок устройств с самосинхронизирующимися вибровозбудителями. Его сотрудникам выдано свидетельство на научное открытие явления синхронизации вращающихся тел (роторов) Раньше вращение неуравновешенных роторов в вибрационных машинах согласовывалось лишь путем установки между ними жестких кинематических связей в виде зубчатых зацеплений, цепных передач и т.п. (рис.1). Результатом становились значительный шум и быстрый износ, сопровождающий работу зубчатой или цепной передачи – из-за наличия знакопеременных или пульсирующих нагрузок. Кроме того, кинематический способ синхронизации сдерживал развитие вибрационной техники, поскольку не мог быть целесообразно применен во многих практически важных случаях, например при значительных расстояниях между вибровозбудителями. При использовании самосинхронизации кинематические связи между роторами оказываются излишними.
Возможности использования самосинхронизации роторов.
Последовавшая вслед за открытием разработка теории и методов расчета устройств с самосинхронизирующимися вибровозбудителями привела к созданию нового класса вибрационных машин – конвейеров, питателей, грохотов, дробилок, мельниц, концентрационных столов, специальных стендов и др. К настоящему времени зарегистрировано около 300 изобретений и патентов, основанных на использовании эффекта самосинхронизации. Многие из этих изобретений, по-видимому, не были бы сделаны без теоретических исследований. Дело в том, что ряд закономерностей самосинхронизации вибровозбудителей вряд ли может быть предсказан на основе чисто интуитивных соображений или обнаружен на основе нецеленаправленного экспериментирования. Вместе с тем возможности использования самосинхронизации вибровозбудителей еще далеко не исчерпаны – постоянно рождаются новые идеи, разрабатываются новые и совершенствуются известные устройства. По-видимому, первое наблюдение и описание явления синхронизации колеблющихся объектов принадлежит Х.Гюйгенсу, который еще в начале второй половины XVII в. обнаружил, что пара маятниковых часов, ходивших по-разному, самосинхронизовалась, когда их прикрепляли к легкой балке вместо стены. В конце 19-го столетия Дж.Рэлей заметил, что две органные трубы с расположенными рядом отверстиями при близкой настройке начинают звучать в унисон, т.е. происходит взаимная синхронизация колебаний. Иногда при этом трубы могут заставить друг друга почти полностью “замолчать”. Аналогичное поведение было обнаружено Рэлеем и у двух электрических или механически связанных камертонов. В конце XIX – начале XX в. были открыты явления синхронизации в электрических цепях и в некоторых электромеханических системах. Взаимная синхронизация электрических генераторов и генераторов электромагнитных колебаний до недавнего времени представляла собой главные технические приложения синхронизации, им посвящено значительное число теоретических и экспериментальных исследований.

 Медицинские технологии
Медицинские технологии Приборы для измерения времени и частоты
Приборы для измерения времени и частоты Приборы для измерения механических величин
Приборы для измерения механических величин Электропривод
Электропривод Энергетическое машиностроение
Энергетическое машиностроение