|
|

 |
|
Межотраслевая Интернет-система поиска и синтеза физических принципов действия преобразователей энергии
|
Общий каталог эффектов
 | Гидролокатор |
 |
Гидролокатор
Анимация
Описание
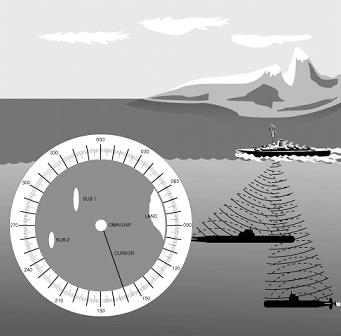
Гидролокатор - гидролокационная станция, гидроакустическая станция (прибор) для определения положения подводных объектов при помощи звуковых сигналов, излучаемых самими объектами (пассивная локация) или возникающих в результате отражения от подводных объектов искусственно создаваемых звуковых сигналов (активная локация).
Принцип работы гидролокатора заключается в том что: импульс электрического напряжения, выработанный генератором, через переключатель «приём — передача» подаётся к электроакустическим преобразователям (вибраторам), излучающим в воду акустический импульс длительностью 10—100мсек в определенном телесном угле или во всех направлениях; по окончании излучения вибраторы подключаются к гетеродинному усилителю для приёма и усиления отражённых от объектов импульсных акустических сигналов; затем сигналы поступают на индикаторные приборы: рекордер, электродинамический громкоговоритель, телефоны, электроннолучевую трубку; на рекордере измеряется и регистрируется электрохимическим способом на ленте расстояние (дистанция) до объекта; с помощью телефонов и электродинамического громкоговорителя принятые сигналы прослушиваются на звуковой частоте и классифицируются, по максимуму звучания определяется пеленг; на электроннолучевой трубке высвечивается сигнал от объекта и измеряется дистанция до него и направление (пеленг). Длительность паузы между соседними посылками импульсов составляет несколько секунд.
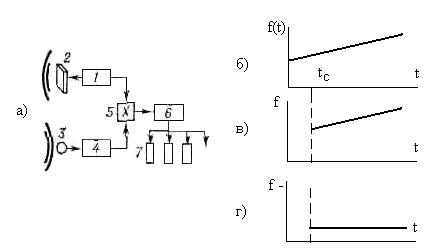
Для определения дальности объекта чаще всего пользуются амплитудной и частотной модуляциями сигнала. Гидролокатор с частотной модуляцией представлен на рисунке 1.
Гидролокатор с частотной модуляцией
Рис.1. а - блок-схема гидролокатора с частотной модуляцией: 1 - генератор, 2 - излучатель, 3 - приёмник,
4 - усилитель, 5 - смеситель, 6 - детектор, 7 - фильтр; б - посланный сигнал; в - принятый сигнал; г - принятый сигнал для неподвижной цели.
При амплитудной импульсной модуляции расстояние R до цели находится по времени запаздывания t0 отражённого импульса: R=ct0/2, где с - скорость распространения звука в среде. При частотной модуляции частота излучаемого сигнала меняется со временем t по линейному закону f(t)=f0+gt, где f0 и g - постоянные начальная частота и скорость изменения частоты. Отражённый сигнал, принятый приёмником 3 (рис.1, а), отличается по частоте от сигнала, излучаемого в данный момент (рис.1, б), т. к. принятый сигнал (рис.1, в) представляет собой задержанную на время tс копию посланного сигнала, а частота излучаемого сигнала за время tс изменилась согласно приведённой формуле. Для неподвижной цели разность частот постоянна и равна: f- =gtс (рис.1, г). Выделив разностную частоту, определяют расстояние до цели R=сf-/2g. Аналогична схема действия гидролокатора с шумовым излучением и корреляционной обработкой сигнала. Основной характеристикой гидролокаторов является дальность обнаружения, которая зависит от мощности излучаемого сигнала, от уровня акустических помех и от условий распространения звука в водной среде. Её обычно определяют по величине так называемого порогового сигнала, т. е. сигнала минимальной интенсивности, ещё различимого на фоне помех.
Наряду с помехами на дальность обнаружения оказывает влияние рефракция звука, имеющая место в сложных гидрологических условиях.Большинство генераторов работает в звуковом и ультразвуковом диапазонах частот (4—40 кГц). Это обусловлено необходимостью получения острой направленности антенны (при относительно небольших её размерах) и достижения заданной разрешающей способности. Гидролокаторы различного назначения обладают дальностью действия от сотен метров до десятков километров и обеспечивают точность пеленгования около 1°. Для уменьшения неблагоприятного влияния гидрологических факторов на дальность действия применяют гидролокаторы с акустической системой, помещенной в контейнер, буксируемый кораблём на глубине несколько десятков метров (гидролокатор с переменной глубиной погружения).
Ключевые слова
Области техники и экономики
Применение эффекта
Для предохранения от разрушения и для уменьшения гидродинамических помех приёмно-излучающую антенну и механизм поворотного устройства 8 помещают в обтекатель 9, который выдвигается из днища 10 судна или стационарно закреплён на нём. Приёмный тракт обычно снабжён временной автоматической регулировкой усиления. В гидролокаторе используют ненаправленное излучение, а приёмное устройство работает так, что обеспечивается круговой обзор всех объектов, находящихся в пределах радиуса наблюдения (например, используется гидроакустическая антенна с веерной характеристикой направленности и электронно-лучевой индикатор кругового обзора). Распространение получили также гидролокатор бокового обзора, приёмно-излучающая антенна которых обладает узкой диаграммой направленности в горизонтальной плоскости и широкой – в вертикальной; максимум диаграммы ориентируется перпендикулярно движению судна. Излучённый импульс при распространении последовательно озвучивает клиновидную полоску дна и рассеивается на его неровностях; принятый сигнал регистрируется на самописце как в эхолоте. В результате при движении судна получается карта релье¬фа дна в прямоугольных координатах. Как правило, такие гидролокаторы предназначены для работы в мелководных районах.
Основные узлы гидролокатора. Обозначения: 1 – гидроакустическая антенна; 2 – реле приёма передачи; 3 – передающий тракт; 4 – приёмный тракт; 5 – блок слухового контроля; 6 – электронно-лучевой индикатор; 7 – регистратор.
Рис.1
Реализации эффекта
Гидрофоны представляют собой подводные аналоги микрофонов и используются при прослушивании шумов, исходящих от цели. На подводных лодках они служат средствами поиска и обнаружения противника чаще, чем гидролокаторы активного типа, так как при излучении локационного сигнала подводная лодка может обнаружить себя. Гидрофоны размещают по дну на входе в гавань; от них по кабелям сигналы поступают на наземные станции обработки, благодаря чему осуществляется постоянный контроль движения надводных и подводных судов в районе порта. Гидрофоны имеют ограниченные возможности, т.к. с их помощью нельзя непосредственно определить удаленность объекта; можно лишь установить направление на него.
Рассмотрим здесь блок-схему активного гидролокатора кругового обзора (рисунок 1).
Блок-схема активного гидролокатора кругового обзора (со сканированием по азимуту)
Рисунок 1
Преобразователь представляет собой устройство, в котором электрическая энергия преобразуется в механическую и наоборот. Такими преобразователями являются, например, микрофоны и громкоговорители. В гидролокаторе преобразователь исполняет обе функции. Обычно он размещается на днище надводного корабля и в верхней части корпуса подводной лодки. Иногда преобразователями служат пьезоэлектрические кристаллы (они меняют свои размеры при подаче на них электрического напряжения либо меняют форму при воздействии внешних сил, и на их поверхности возникает разность электрических потенциалов), но в данной схеме используется магнитострикционный (одновременно магнитоупругий) элемент – никелевый стержень с намотанной на него проволочной катушкой индуктивности. При нарастании электрического тока в катушке возникает магнитное поле, сжимающее стержень, при убывании тока – поле, растягивающее его. На конце стержня закреплена диафрагма, соприкасающаяся с водой, поэтому при сокращениях и удлинениях стержня в воде возбуждаются упругие колебания – звуковые волны. По прибытии эха все происходит в обратном порядке, и движения диафрагмы возбуждают ток в катушке. Набор таких преобразователей располагается по кругу в горизонтальной плоскости; каждый из них ориентирован в своем направлении. Передатчик воздействует на все преобразователи одновременно, и звуковые волны уходят сразу во всех направлениях. Но каждый преобразователь соединен с приемником отдельно, поэтому направление на цель определяется по тому элементу, который «слышит» эхо.
Передатчик. Оператор сидит за пультом управления, контролируя работу передатчика – мощного генератора ультразвуковых импульсов (средняя мощность типичного передатчика – около 8 кВт, пиковая в импульсе достигает 160 кВт). Несущая частота передатчика фиксирована около 20 кГц, а длительность импульса может меняться оператором от 0,005 до 0,1 с. Частота повторения импульсов тоже может варьироваться от 1 до 60 имп/мин – в зависимости от максимальной величины радиуса зоны обзора (все эхо-сигналы должны быть приняты до момента посыла следующего импульса). Выбор частоты передатчика зависит от нескольких величин, влияние которых противоположно: с увеличением частоты возрастают потери на трассе, но интенсивность принимаемых собственных шумов воды и габариты преобразователя становятся меньше. Из этих соображений наиболее выгодным диапазоном эхолокации является полоса частот от 18 до 24 кГц. Акустические устройства шумопеленгации наиболее эффективно работают на частотах ниже 1 кГц, на которых наиболее мощно излучаются шумы кораблей. Выходная мощность передатчика ограничивается сверху тем ее значением, при котором в воде возникает кавитация. Кавитационные пузырьки незамедлительно отражают в преобразователь существенную долю излучаемой мощности. С увеличением давления (т.е. глубины) возрастает и допустимый предел излучаемой акустической мощности.
Реле приема-передачи. Так как один и тот же преобразователь выступает в роли излучателя и чувствительного элемента, его следует автоматически подключать то к передатчику, то к приемнику.
Приемник. Принимаемые различными чувствительными элементами сигналы раздельно поступают в приемно-усилительный тракт, а оттуда – на коммутатор. В приемном тракте есть специальные схемы подавления паразитных сигналов.
Коммутатор. Здесь принятый сигнал направляется по двум раздельным каналам – слухового контроля и видеоиндикации. Сегменты статора (неподвижной части коммутатора) расположены по кругу; на каждый из них поступает сигнал от определенного преобразователя. Положением первого ротора (с выходом на аудиоканал) управляет оператор, выбирая интересующее его направление прослушивания; гетеродинный конвертер канала слухового контроля переводит принятый сигнал на звуковую частоту 800 Гц и посылает его в головные телефоны оператора. Второй ротор коммутатора, связанный с видеоканалом, вращается с постоянной скоростью 1750 об/мин синхронно с разверткой индикатора кругового обзора, подобно тому, как это делается в радаре, и позволяет визуализировать каждый эхо-сигнал с его пеленгом. За время между посылами двух последовательных импульсов зондирования развертка совершается дважды, так что все принятые отражения выводятся на экран индикатора (рисунок 2).
Экран индикатора
Рисунок 2
Регистрирующий индикатор кругового обзора. Представляет собой электронно-лучевую трубку с круговой разметкой экрана, на котором отмечаются все обнаруженные объекты вблизи производящего гидролокацию корабля (ему соответствует круговое пятно в центре экрана). Поскольку отражения от более удаленных целей принимаются позже, развертка ведется по разворачивающейся спирали со скоростью 1 оборот в 1/1750 мин, и на том месте экрана, которое соответствует положению цели, возникает яркое световое пятно. Вращающаяся визирная линия и круговая шкала в 360° позволяют оператору определять истинный пеленг каждой цели. Кроме того, на экране имеется индекс дальности – маленькое световое пятно, которое оператор может вводить на экран для совмещения с изображением цели. Этот индекс связан с автоматическим счетчиком, вычисляющим расстояние до объекта. Выделяя на коммутаторе интересующее его направление, оператор по каналу слухового контроля оценивает характер конкретного эха и его происхождение – от косяка ли рыбы или подводной лодки, либо в результате подводной реверберации. Заодно можно оценить и направление движения цели, так как частота звука от приближающегося объекта выше, а от удаляющегося – ниже.
Блок обработки данных, куда поступает вся первичная информация о цели, вносит поправки с учетом условий распространения звука и движения самого судна с гидролокатором и выдает результаты расчетов дальности, пеленга, курса и скорости цели (необходимые, например, при наведении орудий боевого корабля).
Литература
 1. Физическая энциклопедия / гл.ред. Прохоров А.М. - М.: Большая российская энциклопедия. 1994.
1. Физическая энциклопедия / гл.ред. Прохоров А.М. - М.: Большая российская энциклопедия. 1994.
2. Савельев И.В. Курс физики: Учебник для вузов.т.1: Механика. Молекулярная физика. – М.: Наука, 1989
 Техника, используемая в геофизических исследованиях
Техника, используемая в геофизических исследованиях Военно-инженерная техника
Военно-инженерная техника Технологии и техника промышленного рыболовства
Технологии и техника промышленного рыболовства Общие структурные элементы и узлы измерительных приборов и систем
Общие структурные элементы и узлы измерительных приборов и систем Приборы для измерения акустических величин и характеристик
Приборы для измерения акустических величин и характеристик Системы и устройства отображения информации
Системы и устройства отображения информации