|
|

 |
|
Межотраслевая Интернет-система поиска и синтеза физических принципов действия преобразователей энергии
|
Общий каталог эффектов
 | Пьезоэлектрический двигатель |
 |
Пьезоэлектрический двигатель, создающий вращательное движение
Анимация
Описание
Известно, что некоторые твердые материалы, например, кварц способны в электрическом поле изменять свои линейные размеры. Железо, никель, их сплавы или окислы при изменении окружающего магнитного поля также могут изменять свои размеры. Первые из них относятся к пьезоэлектрическим материалам, а вторые - к пьезомагнитным. Соответственно различают пьезоэлектрический и пьезомагнитный эффекты.
Пьезоэлектрический двигатель может быть выполнен как из тех, так и из других материалов. Однако наиболее эффективными в настоящее время являются пьезоэлектрические, а не пьезомагнитные двигатели.
Существует прямой и обратный пьезоэффекты. Прямой - это появление электрического заряда при деформации пьезоэлемента. Обратный - линейное изменение размеров пьезоэлемента при изменении электрического поля. Впервые пьезоэффект обнаружили Жанна и Поль Кюри в 1880 году на кристаллах кварца. В дальнейшем эти свойства были открыты более чем у 1500 веществ, из которых широко используются сегнетова соль, титанат бария и др.
Работа пьезоэлектрического двигателя (пьезомотора) основана на обратном пьезоэлектрическом эффекте, а именно на преобразовании электрической энергии в механическую. Однако преобразование малых смещений, создаваемых этим пьезо-эффектом, во вращение, является сложной инженерной задачей.
Статор двигателя содержит пьезокерамическое кольцо, на котором укреплены толкатели, упирающиеся на внутреннюю поверхность ротора, выполненного в виде цилиндрической чашки, закрепленной на валу. На торцевые поверхности пьзокерамического кольца нанесены электроды, подключаемые к генератору ультразвуковых колебаний. Частота генератора соответствует одной из частот собственных механических колебаний пьезокерамического кольца в радиальном направлении.
Процесс преобразования колебаний пьезокерамического кольца в поступательное (вращательное) движение ротора (механическое детектирование) осуществляется следующим образом:
* при включении генератора механические колебания пьезокерамического кольца через толкатели передаются на ротор;
* в области фрикционного контакта толкателей с ротором векторы сил, передаваемых толкателями, раскладываются на составляющие — составляющую вдоль радиуса ротора и составляющую, направленную по касательной к окружности ротора;
* последняя составляющая приводит ротор во вращательное движение, скорость вращения ротора при этом пропорциональна амплитуде механических колебаний кольца.
Конструкция двигателя изображена на рис.1.
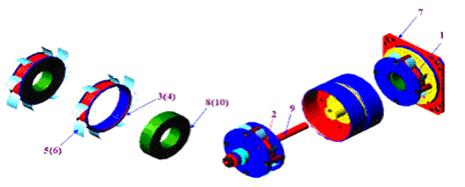
Устройство пьезоэлектрического двигателя.
Обозначения: 1, 2 – пьезоэлектрические осцилляторы, 3, 4 – волновые оболочки, 5, 6 – толкатели, 7 – основание, 8, 10 – кольцевые пьезоэлементы, 9 – вал двигателя.
Рис. 1.
Приведенная конструкция включает два кольцевых пьезоэлектрических осциллятора 1 ,2, один из которых установлен на основании 7, а другой на валу 9 через прокладки, изолирующие ультразвук. Каждый из осцилляторов включает кольцевой пьезоэлемент 8 (10), выполненный в виде кольцевого резонатора с радиальной формой колебаний. На торцевые поверхности пьезоэлементов нанесены электроды, через которые двигатель подключается к электронному устройству, контролирующему двигатель – драйверу. Волновые оболочки 3, 4 установлены на внешние цилиндрические поверхности пьезоэлементов. Толкатели 5 и 6 закреплены на этих волновых оболочках. При сборке двигателя толкатели устанавливаются под углом и с определенным механическим напряжением к внутренней поверхности ротора. Ротор может вращаться вокруг вала 9.
Отметим, что использование одного пьезоэлемента достаточно для вращения двигателя в одном направлении. Второй пьезоэлемент необходим для реверсивного движения двигателя. По сути, реверсивный двигатель состоит из двух нереверсивных (однонаправленных) двигателей, связанных между собой через общий вал.
Направление вращения нереверсивного двигателя задается наклоном толкателей по отношению к внутренней поверхности ротора. Изменение направления вращения нереверсивного двигателя может быть достигнуто переустановкой осциллятора на другую сторону. В нереверсивном двигателе ротор жестко связан с валом.
Ключевые слова
Области техники и экономики
Применение эффекта
Отсутствие обмоток и простота технологии изготовления не являются единственными преимуществами пьезоэлектрических двигателей. Высокая удельная мощность (123 Вт/кг у пьезоэлектрических двигателей и 19 Вт/кг у обычных электромагнитных микродвигателей), большой КПД (получен рекордный до настоящего времени КПД = 85%), широкий диапазон частот вращения и моментов на валу, отличные механические характеристики, отсутствие излучаемых магнитных полей и ряд других преимуществ пьезоэлектрических двигателей позволяют рассматривать их как двигатели, которые в широких масштабах заменят применяемые в настоящее время электрические микромашины.
Надо отметить, что применение пьезоэлектрических двигателей пока весьма ограничено. Применение пьезоэлектрических двигателей в аппаратах звуко- и видеозаписи позволяет по новому подойти к проектированию механизмов транспортирования ленты,поскольку элементы этого узла органически вписываются в двигатель,становясь его корпусом, подшипниками, прижимом и т.п. Указанные свойства пьезодвигателя позволяют осуществить непосредственный приводдиска проигрывателя путем установки на его валу ротора, к поверхностикоторого постоянно прижат осциллятор. Мощность на валу проигрывателяне превышает 0,2 Вт, поэтому ротор двигателя может быть изготовлен как изметалла, так и из пластмассы, например карболита.
Присоединение к ротору двигателя стрелки и возвратной пружины позволяетиспользовать двигатель в качестве малогабаритного и дешевого электроизмерительного прибора с круглой шкалой.
На основе линейных пьезодвигателей изготавливают электрические реле с потребляемой мощностью от нескольких десятков микроватт до нескольких Вт. Такие реле в рабочем состоянии не потребляют энергии.После срабатывания сила трения надежно удерживает контакты взамкнутом состоянии.
Пьезодвигатели могут найти широкое применение в различных автоматах, роботах,протезах, детских игрушках и в других устройствах.
Изучение пьезодвигателей только началось, поэтому не все их возможности раскрыты. Предельная мощность пьезоэлектрических двигателей принципиально неограничена. Однако конкурировать с другими двигателями они могут покав диапазоне мощностей до 10 Вт. Это связано не только сконструктивными особенностями, но и с уровнем развития науки и техники, в частности с совершенствованием пьезоэлектрических, сверхтвердых и износостойких материалов.
Реализации эффекта
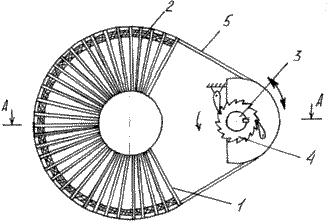
Двигатель (рис.1) содержит биморфные пьезоэлементы 1, склеенные резиной 2, выходной вал 3, храповый механизм 4, пасик 5.
Схема пьезоэлектрического двигателя
Рис.1
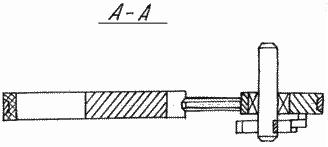
Вид в разрезе
Рис.2
При подаче переменного напряжения на биморфные пьезоэлементы 1 последние изгибаются и их подвижные концы совершают колебательные движения с частотой подаваемого напряжения. Пасик, охватывающий эти подвижные концы, начинает также совершать колебательные движения, которые передаются храповому механизму, преобразующему колебательные движения во вращательное движение выходного вала 3.
Для повышения момента вращения двигателя множество биморфных пьезоэлементов электрически соединены параллельно, радиально установлены и охвачены пасиком, образуя шкив. Движение через пасик передается на храповый механизм.
В результате этого изгибный момент каждой пластины суммируется друг с другом и получается значительный по величине момент вращения.
По сравнению с известными пьезоэлектрическими двигателями в заявляемом устройстве выше ресурс работы из-за отсутствия износостойких прокладок, так как момент вращения передается через резиновый пасик. Ресурс работы пасика из силиконовой резины стабилен и очень продолжителен. Кроме того, существующие пьезоэлектрические двигатели с большим моментом вращения требуют для своего питания использования специальных преобразователей постоянного напряжения в напряжение ультразвуковой частоты
Работа двигателя основана на радиальных колебаниях кольцевого пьезоэлектрического резонатора, возбуждаемого частотой приблизительно 80 кГц. Каждый цикл механических радиальных нано-колебаний резонатора трансформируется в одиночный шаг углового движения. Непрерывная последовательность одиночных шагов формирует плавное вращение ротора, который связан с валом. Величина результирующего нано-движения определяется набором одиночных шагов и зависит от длительности возбуждения резонатора. Минимальный угловой шаг, приблизительно 0.5 угл.сек соответствует длительности возбуждения в диапазоне 40-60 мкс. Легкий вес ротора (приблизительно 40 г) и высокий пусковой момент (приблизительно 0.5 Н*м) обеспечивают высокое угловое ускорение, так что время разгона до максимальной скорости 30 об./мин составляет приблизительно 300мкс. Соответствующий момент самоторможения составляет 0.55 Н*м. Эти характеристики обеспечивают плавное изменение шага от 0.5 угл.сек до непрерывного движения, широкий диапазон скорости, от 0.5 угл.сек/сек. до 30 об./мин, что соответствует шести порядкам динамического диапазона.
Области применения: прецизионная робототехника, Patch clamp и IVF микроманипуляторы, микро-инъекционные системы, микрохирургические системы, интегральная полупроводниковая техника, волоконная и лазерная техника и многие другие.
Литература
 1. Вольдек А.И. Электрические машины. – Л.: Энергия, 1974.
1. Вольдек А.И. Электрические машины. – Л.: Энергия, 1974.
2. Ковчин С.А., Сабинин Ю.А. Теория электропривода. – СПб: Энергоатомиздат, 1984.
 Вакуумная техника
Вакуумная техника Бытовая техника
Бытовая техника Космическая техника и ракетостроение
Космическая техника и ракетостроение Двигателестроение
Двигателестроение Станкостроение
Станкостроение Электропривод
Электропривод