|
|

 |
|
Межотраслевая Интернет-система поиска и синтеза физических принципов действия преобразователей энергии
|
Общий каталог эффектов
 | Гидролокация |
 |
Гидролокация
Описание
Гидролокация – определение места нахождения подводного объекта либо по звуковым сигналам, испускаемым самим объектом (пассивная гидролокация), либо по отражению или рассеянию от объекта специального излучённого звукового сигнала (активная гидролокация).
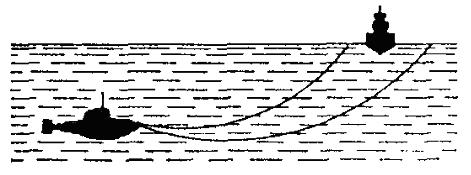
При пассивной гидролокации (шумопеленговании) направление на источник звука определяют, исследуя пространственную структуру звукового поля, создаваемого источником. При этом используются различные методы пеленгования: максимальный, когда остронаправленную гидроакустическую антенну располагают так, чтобы принятый сигнал был максимальным; нулевой, где используют две антенны, диаграммы направленности которых так сдвинуты друг относительно друга, чтобы суммарная диаграмма имела глубокий минимум, направление на источник звука получают по минимуму сигнала от него; этот способ имеет большую точность из-за того, что крутизна диаграмм направленности антенн вблизи нуля существенно больше, чем вблизи максимума; фазовый, в котором определяют разность фаз между сигналами, принятыми двумя разнесёнными в пространство приёмными антеннами; корреляционный – разновидность фазового, в нём по измерению взаимной корреляции определяют относительный временной сдвиг прихода сигнала на два разнесённых приёмника. Как правило, используется комбинация нескольких методов, при этом азимутальное направление на объект соответствует измеренному, а для определения истинного направления по вертикали следует вводить поправку на рефракцию (рис.1). Расстояние до объекта и траекторию его перемещения можно определять, измеряя направление на него из нескольких точек, разнесённых в пространстве.
Схема гидролокатора. Ход лучей соответствует типичным условиям полярных районов
Рис.1
При активной гидролокации используется отражённый или рассеянный объектом сигнал, поэтому в активной локации создаётся мощное направленное излучение импульсов акустических с заполнением несущей частотой. При этом направление на объект определяется аналогично пассивному методу, а расстояние R до объекта по времени t, прошедшему от излучения импульса до прихода эхо-сигнала: R=ct/2, где с – скорость звука в воде. Наряду с разрешающей способностью по расстоянию, основной характеристикой гидролокаторов является дальность обнаружения, зависящая от мощности излучаемого звука, уровня акустических помех и условий распространения звуки в водной среде. Выбop частоты заполнения зависит от назначения гидролокатора. Для дальнего обнаружения на расстояниях в десятки километров и более используют НЧ порядка единиц кГц, которые слабо поглощаются в морской воде; однако при этом необходимо применение приёмно-излучающих антенн очень больших размеров. Высокочастотные гидролокаторы более компактны, однако дальность их действия не превышает нескольких километров. Например, для рыбопоиска используют обычно частоты от десятков до сотен кГц. Длительность импульсов НЧ также меняется в широких пределах; она определяет разрешающую способность по расстоянию ΔR= ct/2. Иногда применяется квазинепрерывный сигнал с частотномодулируемым заполнением для определения расстояния; используются и другие более сложные сигналы, например шумовые с последующей корреляционной обработкой. Основными помехами в активной гидролокации являются собственные шумы океана и реверберация, обусловленная рассеянием звука поверхностью дном и толщей воды. Для выделения сигнала на фоне помех используют различные методы, в частности метод накопления, основанный на том, что сигнал, отраженный от объекта, складывается по давлению, как регулярный, а шумовой – по интенсивности. Увеличение мощности излучения улучшает отношение сигнал/шум, однако реверберационная помеха при этом не меняется, её можно уменьшить, укорачивая длительность посылки или сужая диаграмму направленности системы, но в последнем случае увеличивается время, необходимое на просмотр сигналов с различных направлений.
Ключевые слова
Области техники и экономики
Используемые естественнонаучные эффекты
Разделы естественных наук используемых естественнонаучных эффектов
Применение эффекта
Гидролокация имеет большое значение в навигации для обнаружения невидимых подводных препятствий, при рыбной ловле для обнаружения косяков и отдельных крупных рыб, в океанологии как инструмент исследования физических свойств океана, картографирования морского дна, поиска затонувших судов и тому подобное, а также в военных целях для обнаружения подводных лодок, надводных кораблей и др. и наблюдения за ними, для определения координат целей при применении торпедного и ракетного оружия.
Шумопеленгаторные системы могут устанавливаться как на подводных лодках, так и на надводных кораблях. Наиболее, эффективны стационарные пассивные системы, в виде протяжённых антенн, содержащих большое количество гидрофонов; данные от этих антенн по кабелю передаются на береговые станции обработки. Пассивные системы используются также в гидроакустических радиобуях, которые, как правило, сбрасываются с самолётов-разведчиков и с помощью приёмной радиоаппаратуры, находящейся на этих самолётах, позволяют быстро оценить гидроакустическую обстановку в данном районе. Определение направления на шумящий объект пассивным методом используется и в самонаводящихся торпедах.
Примерами гидролокационных устройств являются:
Гидрофоны - представляют собой подводные аналоги микрофонов и используются при прослушивании шумов, исходящих от цели. На подводных лодках они служат средствами поиска и обнаружения противника чаще, чем гидролокаторы активного типа, так как при излучении локационного сигнала подводная лодка может обнаружить себя. Гидрофоны размещают по дну на входе в гавань; от них по кабелям сигналы поступают на наземные станции обработки, благодаря чему осуществляется постоянный контроль движения надводных и подводных судов в районе порта. Гидрофоны имеют ограниченные возможности, т.к. с их помощью нельзя непосредственно определить удаленность объекта; можно лишь установить направление на него.
Гидролокатор с острой диаграммой направленности - излучая сигналы и принимая их отражения, обнаруживает цели и измеряет их дальности и пеленги. Поиск ведется последовательными шагами: оператор наводит преобразователь на заданное направление, посылает импульс и ждет его отражение; потом переходит на другой пеленг и повторяет все снова – и так до тех пор, пока не проверит всю зону обзора.
Аппаратура для определения глубины погружения цели работает совместно с активным гидролокатором, поскольку не имеет своего передатчика и лишь воспринимает отражения сигналов, испущенных активным прибором. Набор остронаправленных преобразовательных элементов этой аппаратуры имеет вид вертикальной линейки, сканируя которую получают в угловой мере данные о погружении цели; эта информация в совокупности с результатами измерений традиционных угломерных приборов позволяет определить глубину и дальность цели.
Гидроакустический телефон – своеобразный подводный аналог радиотелефона. Промодулированные голосом импульсы на ультразвуковой несущей частоте распространяются в воде и принимаются судном, где они детектируются и подаются в телефонную трубку. Такая система используется для связи подводных лодок между собой и с надводными кораблями.
Реализации эффекта
Эхолот - навигационный прибор для автоматического измерения глубины водоёмов с помощью гидроакустических эхо-сигналов. Обычно в днище судна устанавливается вибратор, к которому периодически подаются от генератора электрические импульсы, преобразуемые им в акустические, распространяющиеся в ограниченном телесном угле вертикально вниз. Отражённый дном акустический импульс принимается тем же вибратором, который преобразует его в электрический. После усиления импульс поступает на индикатор глубины, отмечающий отрезок времени (в сек) от момента посылки импульса до момента возвращения эхо от дна и преобразующий его в визуальные показания или запись глубины h = сt/2 в м, где скорость звука с = 1500 м/сек. Длительность импульсов — от 0,05 до 20 мсек с частотой заполнения от 10 до 200 кГц. Малые длительности и высокие частоты используются при измерениях малых глубин, большие длительности и низкие частоты — при измерении больших глубин. Вибратором может служить магнитострикционный преобразователь или пьезокерамический. В качестве индикаторов глубин применяются проблесковые указатели с вращающейся неоновой лампочкой, вспыхивающей в момент приёма эхо-сигнала; стрелочные, электроннолучевые и цифровые указатели, а также самописцы, записывающие измеряемые глубины на движущейся бумажной ленте электротермическим или электрохимическим методом. Эхолот изготовляются на разные интервалы глубин, в пределах от 0,1 до 12 000 м и работают при скоростях хода судна до 30 узлов (55 км/ч) и даже более. Погрешность Эхолот от 1% до сотых долей процента. Эхолот используются также для поиска косяков рыбы, подводных лодок, для исследования звукорассеивающих слоев, определения типа грунта, стратификации донных осадков и др. гидроакустических измерений.
Гидроакустические радиобуи – система плавучих устройств, каждое из которых несет на себе гидрофон и радиопередатчик индивидуальной частоты. Разбросанные с самолета в заданном районе, они посылают сигналы о присутствии, например, подводной лодки, сопоставление которых дает информацию о приблизительном ее местонахождении.
Береговая система дальнего обнаружения судов, терпящих бедствие (т.н. система СОФАР), функционирует благодаря сверхдальнему распространению звука (до нескольких тысяч километров от источника) по подводному звуковому каналу. Если в звуковом канале взорвать заряд, то по звуковому импульсу можно определить положение его источника, измеряя разность времен прихода импульсов, принятых ненаправленными приемниками в трех далеко отстоящих друг от друга пунктах. Бомбами для подачи подобных сигналов бедствия снабжаются подводные лодки и надувные спасательные плоты.
Литература
 1. Физическая энциклопедия / Гл. ред. А.М. Прохоров. – М.: Большая Российская энциклопедия. 1998.
1. Физическая энциклопедия / Гл. ред. А.М. Прохоров. – М.: Большая Российская энциклопедия. 1998.
2. Яковлев А.Н., Каблов Г.П. Гидролокаторы ближнего действия. Л., 1983
 Техника, используемая в геофизических исследованиях
Техника, используемая в геофизических исследованиях Военно-инженерная техника
Военно-инженерная техника Электроакустическая, ультразвуковая и инфразвуковая техника
Электроакустическая, ультразвуковая и инфразвуковая техника Полупроводниковые приборы и микроэлектроника
Полупроводниковые приборы и микроэлектроника Производство материалов для электроники и радиотехники
Производство материалов для электроники и радиотехники